HUGWBC:上海交大和上海人工智能实验室联合开发的通用人形机器人控制器
HugWBC是一种由上海交通大学和上海人工智能实验室联合开发的通用人形机器人控制器,其功能特点包括多步态控制、精细操作能力、噪声课程学习、奖励机制优化以及非对称强化学习算法的应用,使其在复杂任务中表现出色。
HugWBC主要功能特点包括:
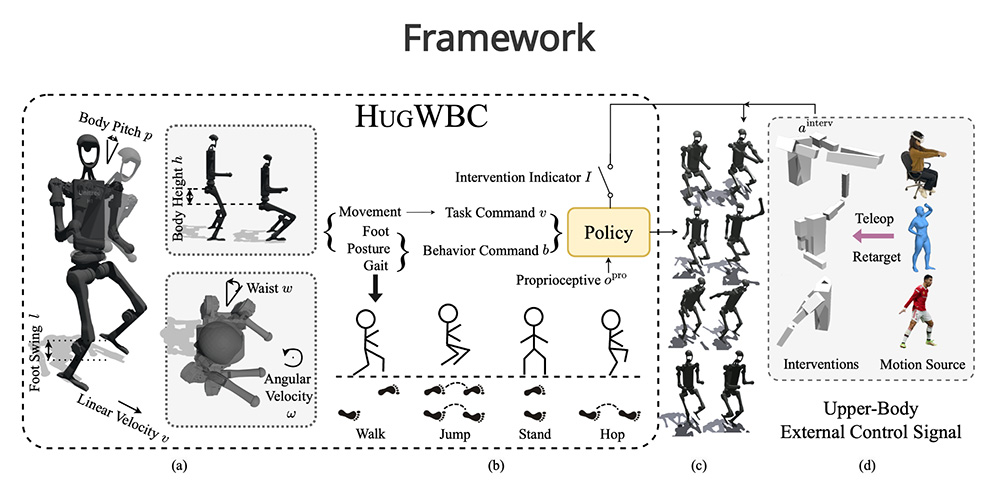
1. 多步态控制能力:HugWBC能够同时掌握三种步态,并通过扩展的指令空间(包括任务指令和行为指令)实现细致的运动控制。这些指令涵盖了姿态、步伐和步态指令,能够组合产生多样化的步态。
2. 精细运动控制:HugWBC支持在站立和各种姿态下完成精细的操作任务,并在干扰测试中表现优于未经过介入训练的基线方法。这表明其在复杂操作任务中的鲁棒性较强。
3. 噪声课程学习:研究团队设计了噪声课程,以促使机器人学习上肢的外部控制干预,从而实现更细致的运动控制。这种学习方式帮助机器人在真实场景中更好地适应复杂任务。
4. 奖励机制:HugWBC采用了速度奖励和对称奖励,以引导机器人学习细粒度的步态和自然的对称运动行为。这种奖励机制有助于提升机器人的运动质量。
5. 非对称强化学习算法:HugWBC使用非对称的强化学习算法,通过调整奖励函数来平衡训练过程中的稳定性和动态性能。这种方法在实验中表现出较小的跟踪误差,并且在上肢介入场景中取得了最佳表现。
6. 鲁棒性与稳定性:在实验中,HugWBC在跟踪误差和鲁棒性方面表现良好,尤其是在上肢介入场景中,其表现优于基线方法。这表明HugWBC在应对复杂操作任务时具有较高的适应性和稳定性。
HugWBC项目地址:
1. 项目官网:https://hugwbc.github.io/
2. arXiv技术论文:https://arxiv.org/pdf/2502.03206
标签:

基金从业资格考试题库
一站式备考基金从业资格考试,收录2021-2025年模拟题库!
 盘点亚马逊各国销售榜网址汇总
盘点亚马逊各国销售榜网址汇总 Fruugo北美跨境电商平台(盘点Fruugo北美跨境电商登录网址)
Fruugo北美跨境电商平台(盘点Fruugo北美跨境电商登录网址) Qwen3大模型系列合集,覆盖多个领域!
Qwen3大模型系列合集,覆盖多个领域! 亚马逊全球网点布局大盘点(包括所有开店流程)
亚马逊全球网点布局大盘点(包括所有开店流程) eMAG全球3大国际站大盘点
eMAG全球3大国际站大盘点 美客多全球6大国际站大盘点
美客多全球6大国际站大盘点 Comfy UI入门教程:AI绘画工作流ComfyUI搭建步骤
Comfy UI入门教程:AI绘画工作流ComfyUI搭建步骤 Seed-TTS:字节跳动开发的高质量、多功能的文本到语音(TTS)模型
Seed-TTS:字节跳动开发的高质量、多功能的文本到语音(TTS)模型 一个由谷歌提出的一种多智能体协作框架—— CoA
一个由谷歌提出的一种多智能体协作框架—— CoA 免费AI数据分析神器:一键生成可视化图表,轻松搞定复杂数据
免费AI数据分析神器:一键生成可视化图表,轻松搞定复杂数据 互联网最火的10个大语言模型及其应用场景全解析
互联网最火的10个大语言模型及其应用场景全解析热门工具
 Job In Corner
Job In Corner roop
roop 爱改写
爱改写 EndlessVN
EndlessVN AIBox365
AIBox365热门标签
影视下载AI效率提升短剧搜索短剧资源电子书AI三维生成创意设计效率工具影视资源前端UI组件库搜索引擎AI学习框架AI提示词游戏平台AI写真