CityDreamer4D:南洋理工大学S-Lab团队开发的一个无边界4D城市建模框架
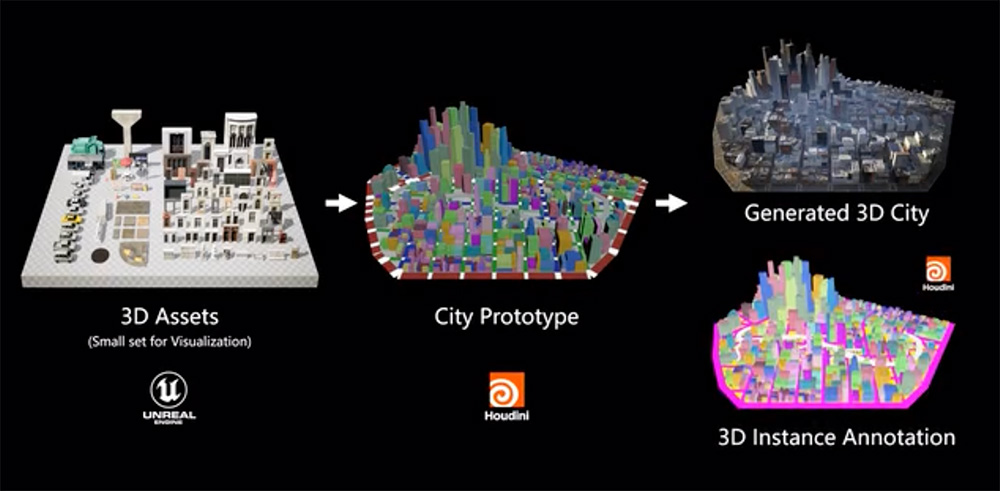
CityDreamer4D 是由南洋理工大学 S-Lab 团队开发的一个无边界 4D 城市建模框架,专注于生成逼真的 4D 城市场景。该框架通过分离动态物体(如车辆)和静态场景(如建筑和道路),并结合高效的鸟瞰图场景表示法,实现了空间和时间维度一致的 4D 城市生成。
CityDreamer4D功能特点:
1、无边界 4D 城市生成:能够生成包含时间和空间维度的动态城市场景,支持无限扩展的城市布局。生成的场景在多视角下保持一致性,支持街景和航拍视角。
2、实例编辑与局部修改:支持对建筑和车辆实例进行局部编辑,例如修改车辆的位置和风格,或调整建筑的高度和外观,不影响其他场景元素。
3、城市风格化:支持对生成的城市进行风格化处理,例如将城市风格转换为《我的世界》或赛博朋克风格,保持多视角一致性。
4、模块化生成:由建筑实例生成器、车辆实例生成器和城市背景生成器三个模块组成,分别处理建筑、车辆和背景元素。
5、数据集支持:开发团队构建了多个数据集,包括 OSM(OpenStreetMap)、GoogleEarth 和 CityTopia,涵盖多视角和多光照条件。
6、高效场景表示:采用高效的鸟瞰图(BEV)场景表示法,通过紧凑的 BEV 地图描述城市布局,结合高度图表示建筑高度。
CityDreamer4D的优点:
1、高质量生成:生成的 4D 城市场景在多视角一致性、场景多样性和生成质量上显著优于现有方法。
2、灵活性高:支持局部编辑和风格化处理,用户可以根据需求定制城市布局、交通模式和整体风格。
3、无边界扩展:能够生成无限扩展的城市布局,适用于大规模城市模拟。
4、数据集丰富:提供多个高精度数据集,涵盖多视角和多光照条件,支持广泛的应用场景。
CityDreamer4D的缺点:
1、计算资源需求高:生成高质量的 4D 城市场景需要较高的计算资源。
2、数据标注复杂:虽然数据集丰富,但生成和标注这些数据需要大量的工作。
3、模型复杂度高:技术架构较为复杂,对开发者的技术背景有一定要求。
CityDreamer4D的项目网址:
1、项目官网:https://www.infinitescript.com/project/city-dreamer-4d
2、GitHub 仓库:https://github.com/hzxie/CityDreamer4D
3、arXiv 技术论文:https://arxiv.org/pdf/2501.08983
CityDreamer4D应用场景:
1、城市模拟与规划:用于生成逼真的 4D 城市场景,支持动态物体和详细环境的生成,适用于自动驾驶、城市规划和虚拟现实等应用。
2、局部编辑与定制化:支持对建筑和车辆实例的局部编辑,适用于建筑和交通设计。
3、城市风格化:能够将不同风格无缝应用于整个城市,适用于游戏开发和娱乐内容创作。
4、多视角一致性:在生成的 4D 城市中,确保多视角一致性,适用于街景和航拍视角的生成。
标签:

基金从业资格考试题库
一站式备考基金从业资格考试,收录2021-2025年模拟题库!
 盘点亚马逊各国销售榜网址汇总
盘点亚马逊各国销售榜网址汇总 Fruugo北美跨境电商平台(盘点Fruugo北美跨境电商登录网址)
Fruugo北美跨境电商平台(盘点Fruugo北美跨境电商登录网址) Qwen3大模型系列合集,覆盖多个领域!
Qwen3大模型系列合集,覆盖多个领域! 亚马逊全球网点布局大盘点(包括所有开店流程)
亚马逊全球网点布局大盘点(包括所有开店流程) eMAG全球3大国际站大盘点
eMAG全球3大国际站大盘点 美客多全球6大国际站大盘点
美客多全球6大国际站大盘点 Comfy UI入门教程:AI绘画工作流ComfyUI搭建步骤
Comfy UI入门教程:AI绘画工作流ComfyUI搭建步骤 Seed-TTS:字节跳动开发的高质量、多功能的文本到语音(TTS)模型
Seed-TTS:字节跳动开发的高质量、多功能的文本到语音(TTS)模型 一个由谷歌提出的一种多智能体协作框架—— CoA
一个由谷歌提出的一种多智能体协作框架—— CoA 互联网最火的10个大语言模型及其应用场景全解析
互联网最火的10个大语言模型及其应用场景全解析 免费AI数据分析神器:一键生成可视化图表,轻松搞定复杂数据
免费AI数据分析神器:一键生成可视化图表,轻松搞定复杂数据热门工具
 EndlessVN
EndlessVN AIBox365
AIBox365 Job In Corner
Job In Corner roop
roop 爱改写
爱改写热门标签
办公软件电影下载AI内容检测AI企业服务小说文学办公生活扩展插件AI金融事务UI组件库自学学习音频工具AI数字虚拟人新媒运营体育频道